



如何构成矩阵或2D图像
RGB LED灯可平铺构成2维(2D)影像。
显示系统结构
RGB LED灯可用于构成正方形的基础结构或模块。它通常包含一块PCB以及一个16×16至64×64的像素阵列,不同的应用有所不同。可将多个模块组合在一起,构成机械系统结构或面板。LED显示系统厂商通常提供各种面板。每个面板都有机械框架,可放置多个模块。它包含一个或多个控制单元,用以提供电源分配、数据接口和处理器。在构建体育场大屏幕或路边广告牌等显示系统的现场,可安装多块面板构成最终显示屏。在施工现场,每块面板的所有数据线和电源线都会集中在中央控制单元。
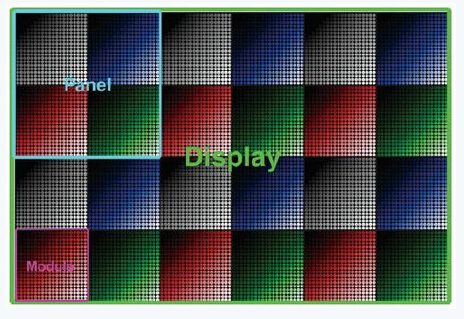
图 5.LED 显示系统由模块/面板/显示屏组成
像素间距
一套LED显示系统包含大量的LED灯和一个大电源。设计系统时需要重点考虑LED灯的密度优化问题。LED 灯的该密度称为每个像素的距离或像素间距。如果像素间距太密,一旦超出了人眼能识别的精度,它就不会改善影像输出质量,而且会增加成本。人眼可识别的两个单光源是在这两点形成1个弧度的1/60(=1 弧分)时。
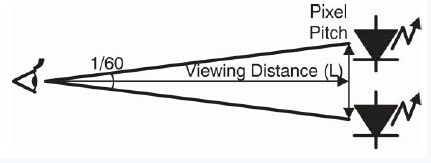
图 6.人眼可识别的分辨率
图6是如何计算人眼可分辨像素间距Dpp1。如公式3所示,其中L为视距。
在最佳实践中,DPP1可视为过大,对于高质量视频系统而言三倍Dpp1就够好了。在公式4中,DPP是指导标准。
公式4 的简单记忆方法是:
所需的像素间距(毫米:mm)=“视距”(米:m)
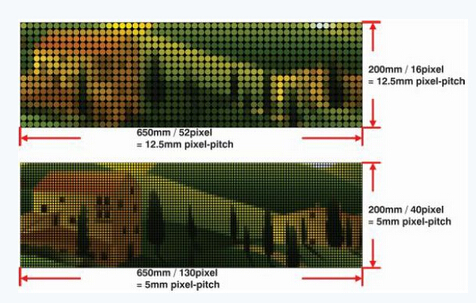
例如,5m视距的系统需要5mm像素间距来实现良好分辨率。另一个视觉实例如图7所示,图中展示了过低像素间距如何降低输出影像质量。像素间距为12.5mm 的影像(上)看起来很粗糙,无法近距离辨识。但保持一定的距离观看时影像开始变得清晰,与观看像素间距为5mm的影像(下)类似。这个实例清楚地说明了视距与像素间距的关系。
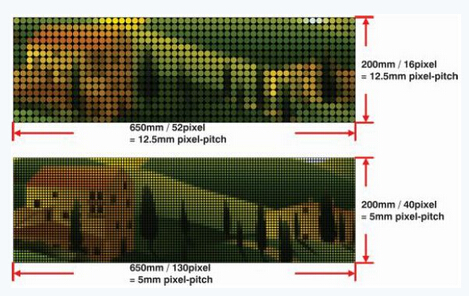
图 7.不同像素间距与视距的对比
静态驱动器与时分复用驱动器
从图2可以看出,LED灯的阴极采用当前市场常见的LED驱动器IC驱动。这里要讨论LED灯的阳极驱动器电路。阴极采用恒流驱动器有优势,阳极希望也只提供足够的电压。但仍需做出如何驱动阳极的重要决定!
图8 对比了静态阳极驱动器系统与时分复用阳极驱动器系统。静态阳极驱动器配置十分明确:一个LED驱动器IC驱动一个LED。在设计具有大量像素点的系统时,静态阳极驱动器需要大量LED驱动器IC。相反,时分复用阳极驱动器系统让多个LED灯共享一个IC,因而使用的LED驱动器IC数量较少。时分复用驱动器的权衡在于输出LED光强度会因分时而降低。
在户外显示系统中,需要极强的LED输出来克服太阳光亮度,以便人眼能看清楚影像。在这种户外系统中,更适合选用静态阳极驱动器。另一方面,在室内系统中,时分复用阳极驱动器则是降低系统构建成本的好方法。
时分复用已经成了当前应用最常用的技术,因此我们将其用于本文剩余部分讨论的应用中。
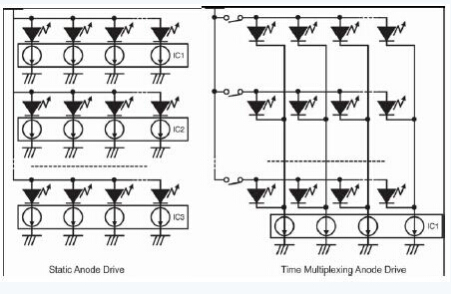
图 8.静态阳极驱动器与时分复用阳极驱动器
如何创建电影/视频影像
之前我们探讨了如何显示静态影像。如果我们不断变化静态影像,就可将其变为电影或视频。
帧速率/帧刷新率
老式模拟电视通常在一秒钟内显示24张不同的静态影像,帧速率为24。
当模拟电视摄像机拍摄另一个模拟电视屏幕时,可产生由视频影像与黑色条带构成的斑马纹混合画面(图9)。这种现象由同步电视摄像机和电视屏幕扫描率引起。在拍摄LED屏幕的摄像机采用时分复用阳极驱动器时,也会出现相同的问题。应用实例包括使用电视摄像机拍摄背景墙壁上由LED显示器放大演员的舞台影像或者用电视摄像机拍摄体育场中体育赛事比分牌或标牌等。要避免这个问题,LED显示器现在需要比摄像机系统运行得更快,特别是在专用LED显示器市场。
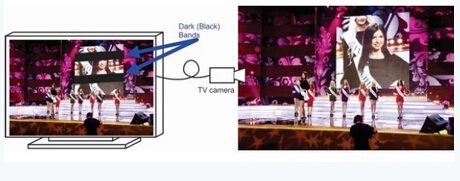
图 9. 电视摄像机拍摄另一个电视屏幕引起的黑色条带
为满足更快运行这一要求,很多LED显示系统都在一个帧周期内反复显示相同的影像,称为帧刷新率。图10是帧速率与刷新率的关系。只有两张帧影像:A 和 B。每个帧重复“影像 x”两次。因而本实例“帧刷新率”= 2 ד帧速率”。
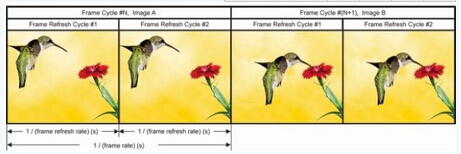
图 10.帧速率与帧刷新率
在普通LED显示系统中,帧速率在50Hz至120Hz的范围内,而帧刷新率则介于50Hz至2kHz之间。



![[易事达]IA4S](/pic/product/201312/20131230/2013123017500594.jpg)
价格面议
[查看详情]
![[科泰]室内Φ3.0双基色](/pic/product/200904/20090402/2009040213544474.jpg)
![[海尔]LED 信息显示屏](/pic/product/200907/20090707/2009070710344194.jpg)
![[雷盛]P10室外单色LED显](/pic/product/200904/20090403/2009040311333292.jpg)
![[科瑞鑫光]KR-3906/2R1G](/pic/product/200906/20090615/2009061513594562.jpg)
![[科泰]Φ5亚表贴全彩](/pic/product/200904/20090402/2009040211320561.jpg)






![[蓝普]HI-P3](/pic/product/201308/20130809/2013080913351643.jpg)